智能小车12:整合软硬件制造蓝牙小车
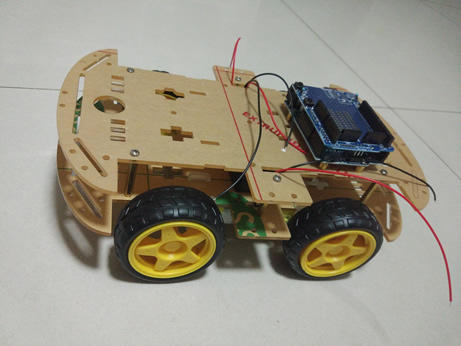
做成一件事结果很短暂,过程很漫长。我昨晚终于把我的小车给组装起来了,就这样:
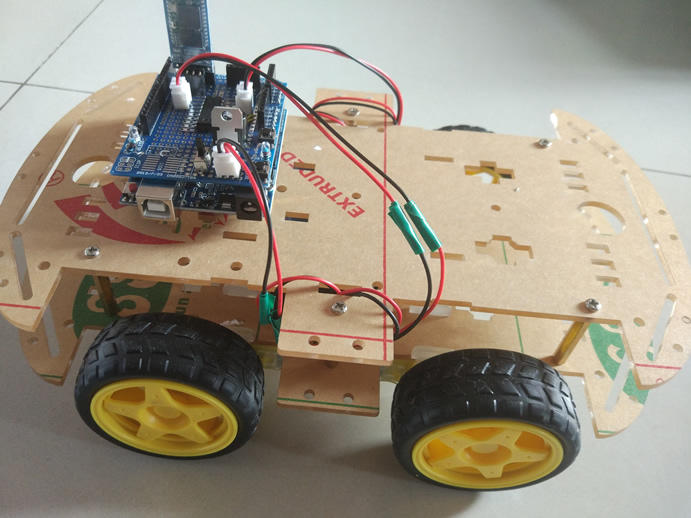
前面已经介绍了底盘、电池的组装。电路板有两层,下面是Arduino Uno, 这个在淘宝上买一块即可。上面的扩展板,是经过好几天的学习,总结了三篇(本文前三篇),而设计出来的。
昨晚主要的任务就是要把这个扩展板焊接出来,连上马达与电源线。再把程序下载到arduino,本小车就可以实现蓝牙控制了。
焊接第一步,在买到的Arduino ProtoShield上焊接各元件,这个基本与protel99里设计的一样。
未焊接前是这样子:

焊接后的正面:

焊接后的背面:

这个还行吧?虽然不太美观,但精度一定小于0.5mm,纯手工制作。焊的时间也比较长,元件加19根线花了4个小时。
焊完了还要把马达与电源连起来,还记得以前的底盘是什么样子么?
以前的设计是有一头为前进方向,但设计电路板的时候并没有考虑这一点。但两根信号线一定是有的,所以这时两边马达的接线方向可能是相反的,要经过测试才知道。
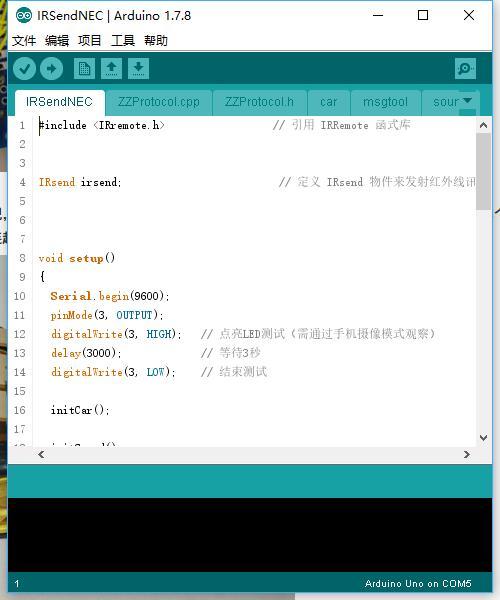
程序的开发在前面的智能小车六《串口协议》、智能小车七《上位机android》介绍过了,如果能看懂这两篇文章。相信普通的arduino程序不是难事。好,把这些程序下载到小车。咱们的小车就可以动起来了。
文/程忠 浏览次数:0次 2017-08-18 13:57:27
前面已经介绍了底盘、电池的组装。电路板有两层,下面是Arduino Uno, 这个在淘宝上买一块即可。上面的扩展板,是经过好几天的学习,总结了三篇(本文前三篇),而设计出来的。
昨晚主要的任务就是要把这个扩展板焊接出来,连上马达与电源线。再把程序下载到arduino,本小车就可以实现蓝牙控制了。
焊接第一步,在买到的Arduino ProtoShield上焊接各元件,这个基本与protel99里设计的一样。
未焊接前是这样子:
焊接后的正面:
焊接后的背面:
这个还行吧?虽然不太美观,但精度一定小于0.5mm,纯手工制作。焊的时间也比较长,元件加19根线花了4个小时。
焊完了还要把马达与电源连起来,还记得以前的底盘是什么样子么?
以前的设计是有一头为前进方向,但设计电路板的时候并没有考虑这一点。但两根信号线一定是有的,所以这时两边马达的接线方向可能是相反的,要经过测试才知道。
程序的开发在前面的智能小车六《串口协议》、智能小车七《上位机android》介绍过了,如果能看懂这两篇文章。相信普通的arduino程序不是难事。好,把这些程序下载到小车。咱们的小车就可以动起来了。
相关阅读
评论:
↓ 广告开始-头部带绿为生活 ↓
↑ 广告结束-尾部支持多点击 ↑