智能小车39:十分钟做个游戏收割机
一、软件准备
1.下载arduino ide
https://www.arduino.cc/en/Main/Software?setlang=cn
现在最新的是1.8.4 有了代码格式化等新功能,好用了些。可选的板子少了些,以前玩的wemos板子就没法选了。
2.编写arduino代码,如下:
二、硬件准备。
1.原料
arduino uno开发板一个
舵机一个
公对公的杜邦线三根
棉签一个
湿巾一张
胶布一寸
细导线1段

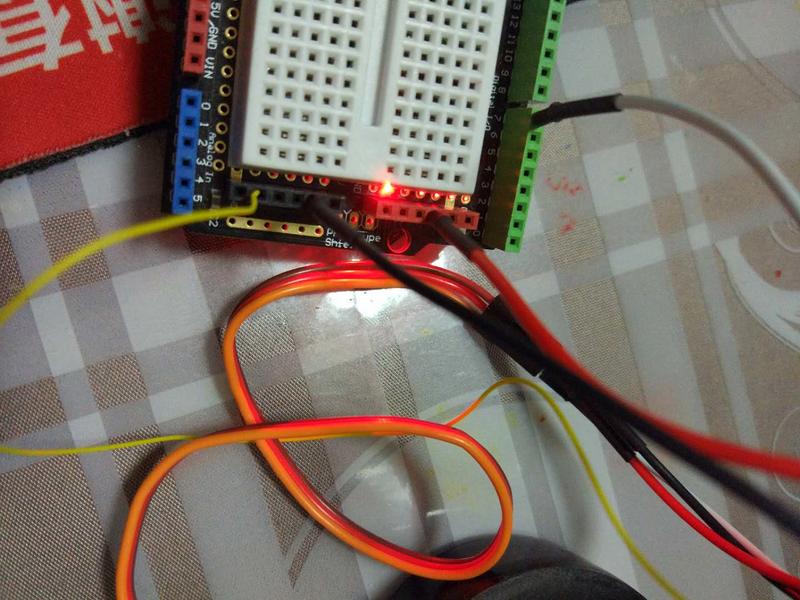
2.组装和连线。
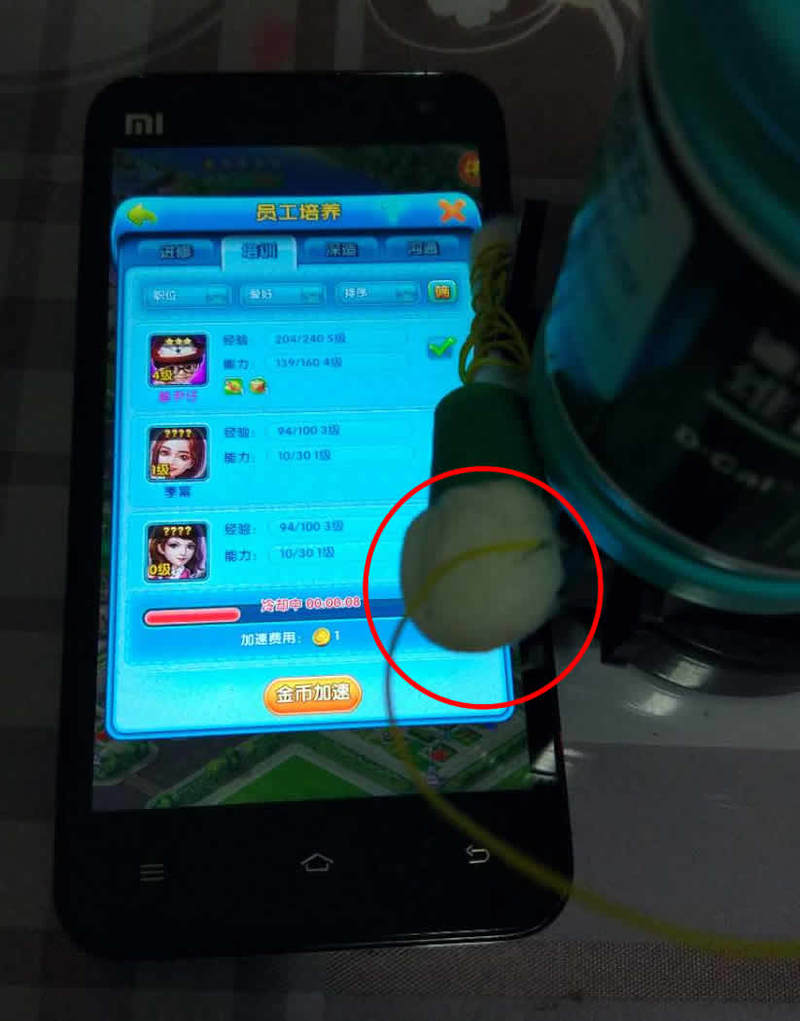
注意上图红圈里的黄线,它接到那儿了,为什么要这么接?
好了,代码里根据实际情况调整好角度。让棉球自动点吧。
这种比较适合,比较“笨”的按钮,就是只需在一处不停的点的那种。
三、机械臂。
这个成本高些,最少得好几百,暂时不投入到这方面。但机械臂比这好玩,配合我的小车可以做各种搬运呢。我认真想了下,我还是先搞明白摄像头的控制、单片机(openwrt)的编程,这是我的主要目标。
文/程忠 浏览次数:0次 2017-10-20 08:59:20
1.下载arduino ide
https://www.arduino.cc/en/Main/Software?setlang=cn
现在最新的是1.8.4 有了代码格式化等新功能,好用了些。可选的板子少了些,以前玩的wemos板子就没法选了。
2.编写arduino代码,如下:
#include
Servo myservo;
int pos=0;
//信号线(黄线)红线(电源线) 棕色(地线)
void setup(){
Serial.begin(9600);
myservo.attach(7); //7号引脚做为信号线
}
void loop(){
myservo.write(12); //转到12度去点击
delay(900); //暂停900毫秒
myservo.write(90); //转到90度,离开屏幕
delay(60000);//暂停1分钟
}二、硬件准备。
1.原料
arduino uno开发板一个
舵机一个
公对公的杜邦线三根
棉签一个
湿巾一张
胶布一寸
细导线1段
2.组装和连线。
注意上图红圈里的黄线,它接到那儿了,为什么要这么接?
好了,代码里根据实际情况调整好角度。让棉球自动点吧。
这种比较适合,比较“笨”的按钮,就是只需在一处不停的点的那种。
三、机械臂。
这个成本高些,最少得好几百,暂时不投入到这方面。但机械臂比这好玩,配合我的小车可以做各种搬运呢。我认真想了下,我还是先搞明白摄像头的控制、单片机(openwrt)的编程,这是我的主要目标。
相关阅读
评论:
↓ 广告开始-头部带绿为生活 ↓
↑ 广告结束-尾部支持多点击 ↑