智能小车42:openwrt的系统配置与gpio操作
一、openwrt的系统配置
openwrt也是基于Linux,因此它与大多数Linux系统一样都有以下配置文件:
1./etc/rc.local
该文件是一个shell脚本,是在系统开机之后最后会调用到的脚本。也就是说,当有任何想要开机自启动的程序都可放在这里。
2./etc/profile
为每个登录用户设置的环境变量 。其中第一句是cat /etc/banner,这个文件内容就是每次我们登录看到的openwrt图案。
3./etc/shells
Linux有多个命令解析外壳程序,shells文件包含系统中所有外壳程序的列表。我只看到了一行,就是/bin/ash
4./etc/fstab
这个与linux不太一样,用cat命令是查不到的。这个文件应该是关于文件系统的静态信息,系统启动时读取并设置。
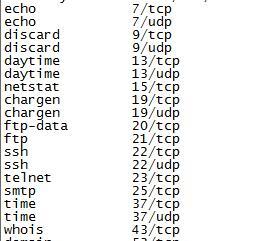
5./etc/services
这个文件是互联网网络服务类型列表。提供文本名称与互联网服务之间的映射,还包含了端口号和协议类型。格式:
service-name port/protocol [aliases ..]
service-name 服务的名称
port 端口号
protocol 使用的协议类型
aliases 可选 ,服务的别名。
如下图:
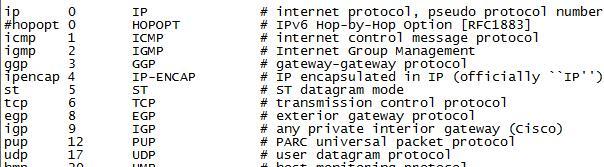
6./etc/protocols
协议定义描述文件,用于描述各种各样的因特网网络协议。格式如下:
protocol number aliases ...
各部分含义和上面的的差不多。
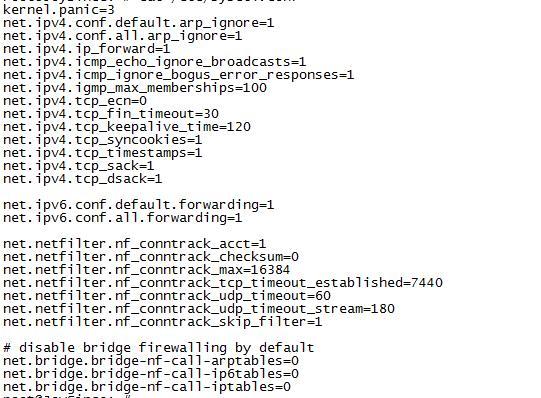
7./etc/syctl.conf
这个是linux内核配置文件,启动后应用,很关键。比如net.ipv4.ip_forward=1表示支持转发包。如下图:
二、openwrt的gpio试验
arduino的gpio相当简单,在以前的文章中多次使用。在《智能小车40:制作openwrt安装包》中虽然知道了怎么用c语言开发openwrt的程序,但我暂时还没掌握怎么用c语言做openwrt的gpio试验。现在是使用一种shell的方法来操作gpio。
1.找到要操作的引脚编号。
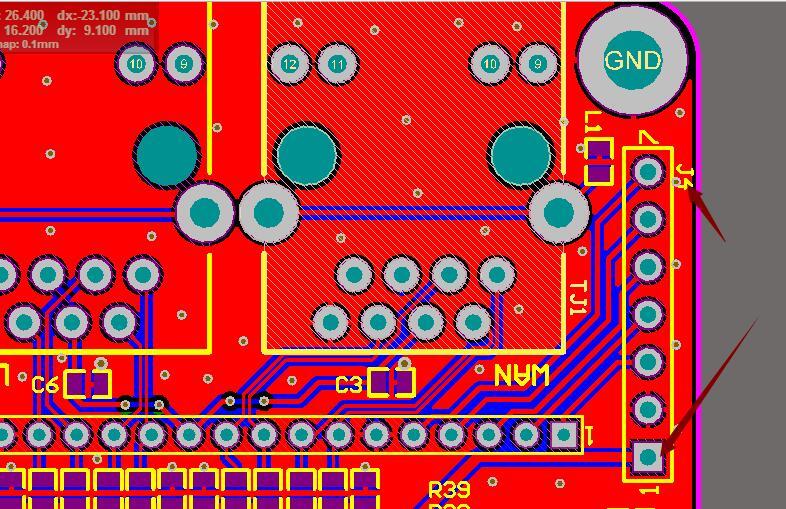
假设要操作如下图所示,最头上的那个引脚做为输出引脚。
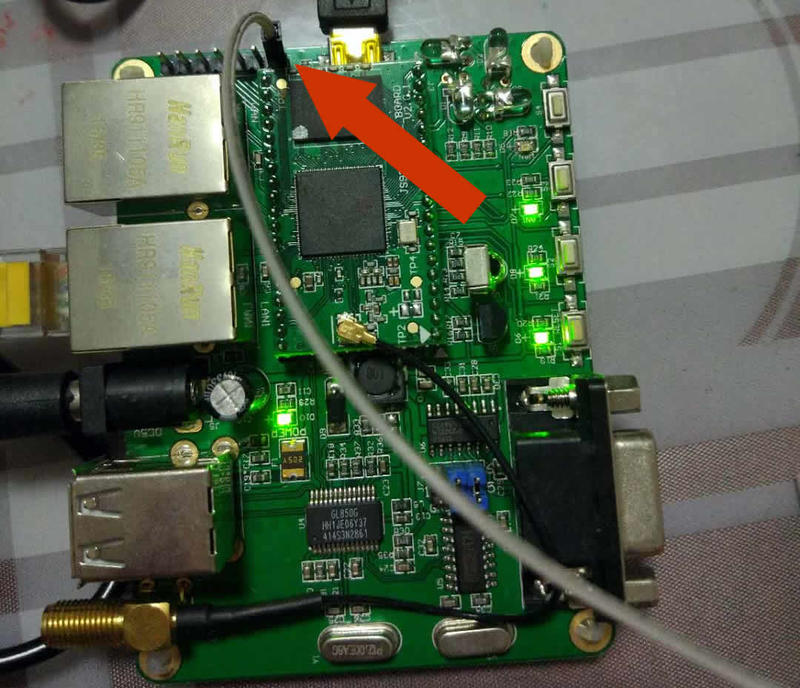
先打pcb图,对应上图的位置,可以找到名叫J4的封装的第1号引脚:
再打开原理图,找到引脚编号:
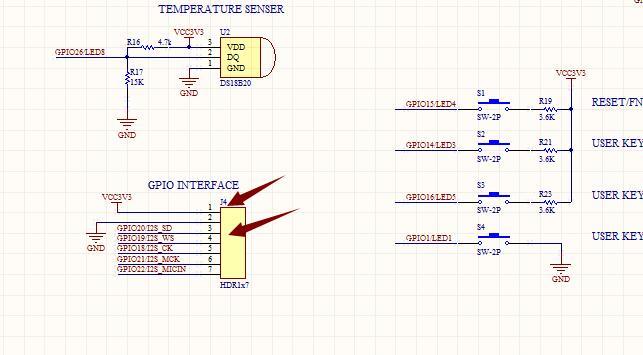
可以看出这是3.3v的电源输出,那么我们用3号引脚,也就是GPIO20了。编号为20.
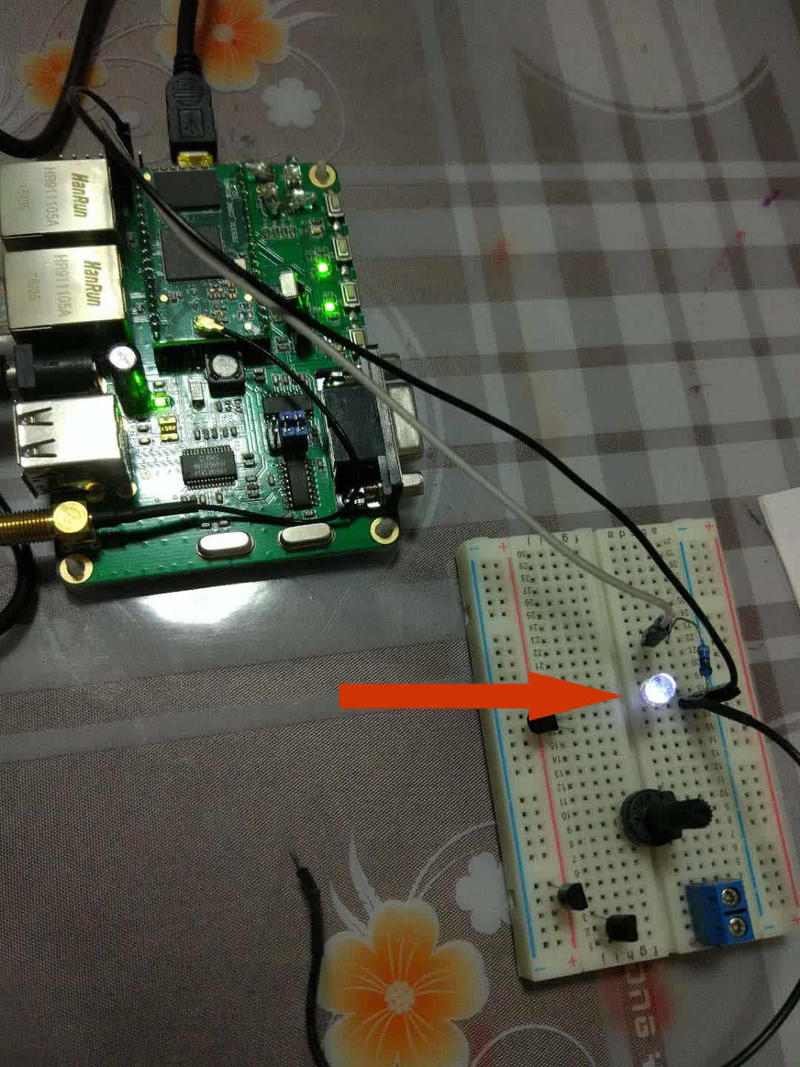
2.编写shell并执行。
echo 20 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio20/direction
echo 1 > /sys/class/gpio/gpio20/value
这时应该就能发现灯亮了
echo 0 > /sys/class/gpio/gpio20/value
灯灭了。
文/程忠 浏览次数:0次 2017-10-26 08:06:20
openwrt也是基于Linux,因此它与大多数Linux系统一样都有以下配置文件:
1./etc/rc.local
该文件是一个shell脚本,是在系统开机之后最后会调用到的脚本。也就是说,当有任何想要开机自启动的程序都可放在这里。
2./etc/profile
为每个登录用户设置的环境变量 。其中第一句是cat /etc/banner,这个文件内容就是每次我们登录看到的openwrt图案。
3./etc/shells
Linux有多个命令解析外壳程序,shells文件包含系统中所有外壳程序的列表。我只看到了一行,就是/bin/ash
4./etc/fstab
这个与linux不太一样,用cat命令是查不到的。这个文件应该是关于文件系统的静态信息,系统启动时读取并设置。
5./etc/services
这个文件是互联网网络服务类型列表。提供文本名称与互联网服务之间的映射,还包含了端口号和协议类型。格式:
service-name port/protocol [aliases ..]
service-name 服务的名称
port 端口号
protocol 使用的协议类型
aliases 可选 ,服务的别名。
如下图:
6./etc/protocols
协议定义描述文件,用于描述各种各样的因特网网络协议。格式如下:
protocol number aliases ...
各部分含义和上面的的差不多。
7./etc/syctl.conf
这个是linux内核配置文件,启动后应用,很关键。比如net.ipv4.ip_forward=1表示支持转发包。如下图:
二、openwrt的gpio试验
arduino的gpio相当简单,在以前的文章中多次使用。在《智能小车40:制作openwrt安装包》中虽然知道了怎么用c语言开发openwrt的程序,但我暂时还没掌握怎么用c语言做openwrt的gpio试验。现在是使用一种shell的方法来操作gpio。
1.找到要操作的引脚编号。
假设要操作如下图所示,最头上的那个引脚做为输出引脚。
先打pcb图,对应上图的位置,可以找到名叫J4的封装的第1号引脚:
再打开原理图,找到引脚编号:
可以看出这是3.3v的电源输出,那么我们用3号引脚,也就是GPIO20了。编号为20.
2.编写shell并执行。
echo 20 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio20/direction
echo 1 > /sys/class/gpio/gpio20/value
这时应该就能发现灯亮了
echo 0 > /sys/class/gpio/gpio20/value
灯灭了。
相关阅读
评论:
↓ 广告开始-头部带绿为生活 ↓
↑ 广告结束-尾部支持多点击 ↑